


 智能驾驶仿真测试方案
智能驾驶仿真测试方案 智慧驾驶
智能驾驶仿真测试方案
智慧驾驶
智能驾驶仿真测试方案
EMTAT自2018年开始已进入智能驾驶仿真测试领域,可根据客户需求提供交钥匙方案,并在EMC转向机器人,转向轴耦合式测功机系统,目标假人,目标驾车等方面有众多优秀的案例与丰富的经验。
我们的系统优势是,低成本、高可靠性、受天 气影响小等,已经广泛应用于智能网联汽车 的自适应巡航控制系统、前车防撞预警系统、自 动刹车辅助系统、盲区监测系统、自动泊车辅助系统、变道辅助系统等ADAS系统中。
-

-
EMC转向机器人
转向机器人主要用于将精确、受控的输入应用于车辆的转向系统,通过内置高性能驱动电机进行动力输出,实现车辆方向盘的左右稳定旋转。 设备内置高精度扭力传感器和角度传感器对车辆方向盘的扭力和角度进行实时的记录、显示和反馈。
-
-
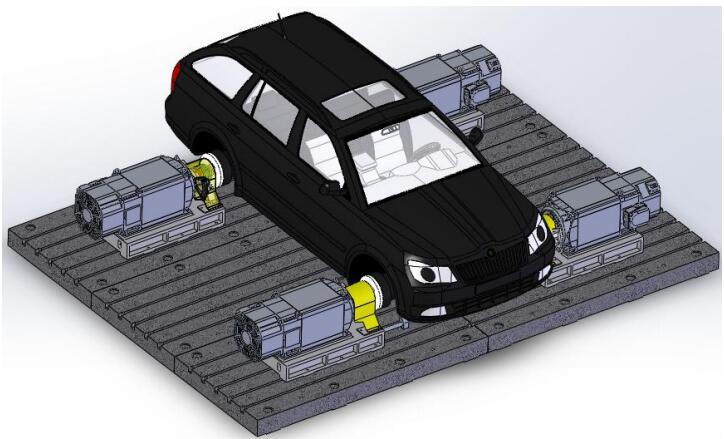
转向轴耦合式测功机系统
加载测功机系统主要由测功电机、扭矩传感器、联轴器、变频器、整流单元、测功机支座、 铸铁平板、夹具及附件等组成。测功机采用柔性化设计,与车辆轮毂采用快速连接结构,用户可以短时快速的完成车辆与测功机的连接。
-
-
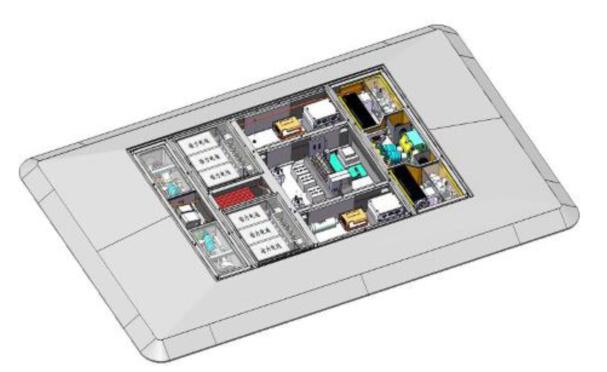
目标假车搭载平板(VTT)
目标假车搭载平板(VTT)主要用于车辆自动驾驶系统开发测试,搭载目标假车(STV)形成可高精度,高速移动的车辆模拟目标物,验证车辆自动驾驶系统的功能、可靠性及稳定性。
-

-
目标假人搭载平板(DTT)
目标假人搭载平板(DTT)分为自由移动式假人搭载平板和拖拽式假人搭载平板主要用于搭载目标假人(STD)形成可高精度,高速移动的人类模拟目标物,验证车辆自动驾驶系统的功能、可靠性及稳定性。(也适配其他品牌假人,如4A公司的PS、BS)
-
-
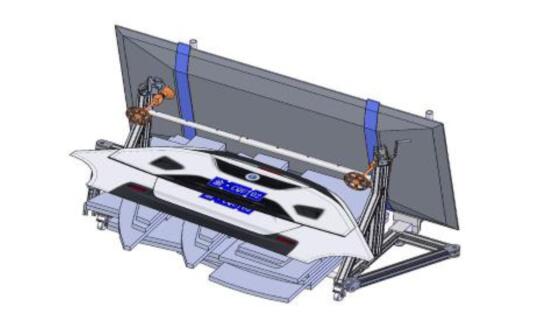
假车目标物转运车
假车目标物转运车被设计用于VTT和STV的短途运 输,帮助试验人员快速的将设备由室内转运至试 验场地,CV采用全铝合金设计,结构轻便,结实可靠。
-

-
智能汽车场地测试——目标假车
目标假车是自动驾驶汽车实车道路试验时不可缺 少的目标物。它能够模拟真实车辆视觉传感器、 毫米波雷达、激光雷达和超声波传感器的探测特 性,设备组装方便,碰撞时不损伤被试车辆,可大幅提高试验的安全性和效率。
-

-
智能汽车场地测试——目标假人
目标假人分为成年假人、儿童假人、骑自行车假人、骑摩托车假人等等,具有与真实行人、骑行者完全相同雷达反射特性,符合C-Ncap、i-vista等测试规范要求。碰撞后可在2min内完成快速修复。













北京电磁测通科技有限公司
地址:北京市朝阳区八里庄远洋商务61号1704室
服务热线
010-65570528
邮箱
sales@emtat.com
